
ساخت ربات مکعبی جهنده
ساعت 24-محققان موسسه تحقیقاتی MIT موفق به ساخت ربات مکعبی شدند که قادر است بدون در نظر گرفتن سطح و شیب از ناهمواریها بالا برود.
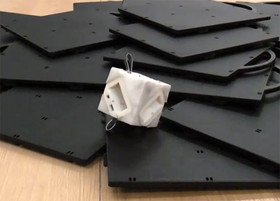
ساختار درونی ربات و سیستم چرخش فنرهای نواری آن به گونهای طراحی شده که ارتفاع پرش و تعیین مسیر آن کاملا پیشبینی شده و قابل هدایت باشد.
هنگامی که موتورهای ربات شروع به چرخش میکنند، فنرهای متصل جمع شده و با رها شدن انرژی، پتانسیل موجود در فنرها آزاد شده و به دنبال آن ربات به سمت پیشبینیشده پرش میزند.
محققان MIT ربات مکعبی را در چند مرحله آزمایش کردند؛ این مراحل شامل پرش عمودی، پرش عرضی و پرش با زاویه پیشرونده است.
محققان پس از موفقیت این ربات در مراحل مختلف از جمله صعود از شیب ناهموار به دنبال ساخت نسخه دوم با موتورهای قدرتمندتری هستند.
ربات مکعبی علاوه بر حسگرهای کنترلی به سایر حسگرها مثل شیبسنج و زاویهسنج مجهز شده است.
یکی از کاربردهای این ربات در صورت افزایش حسگرها، عملیات جستجو و شناسایی است.
مرجع : خبرگزاری ایسنا





ساعت 24 از انتشار نظرات حاوی توهین و افترا و نوشته شده با حروف لاتین (فینگیلیش) معذور است.